
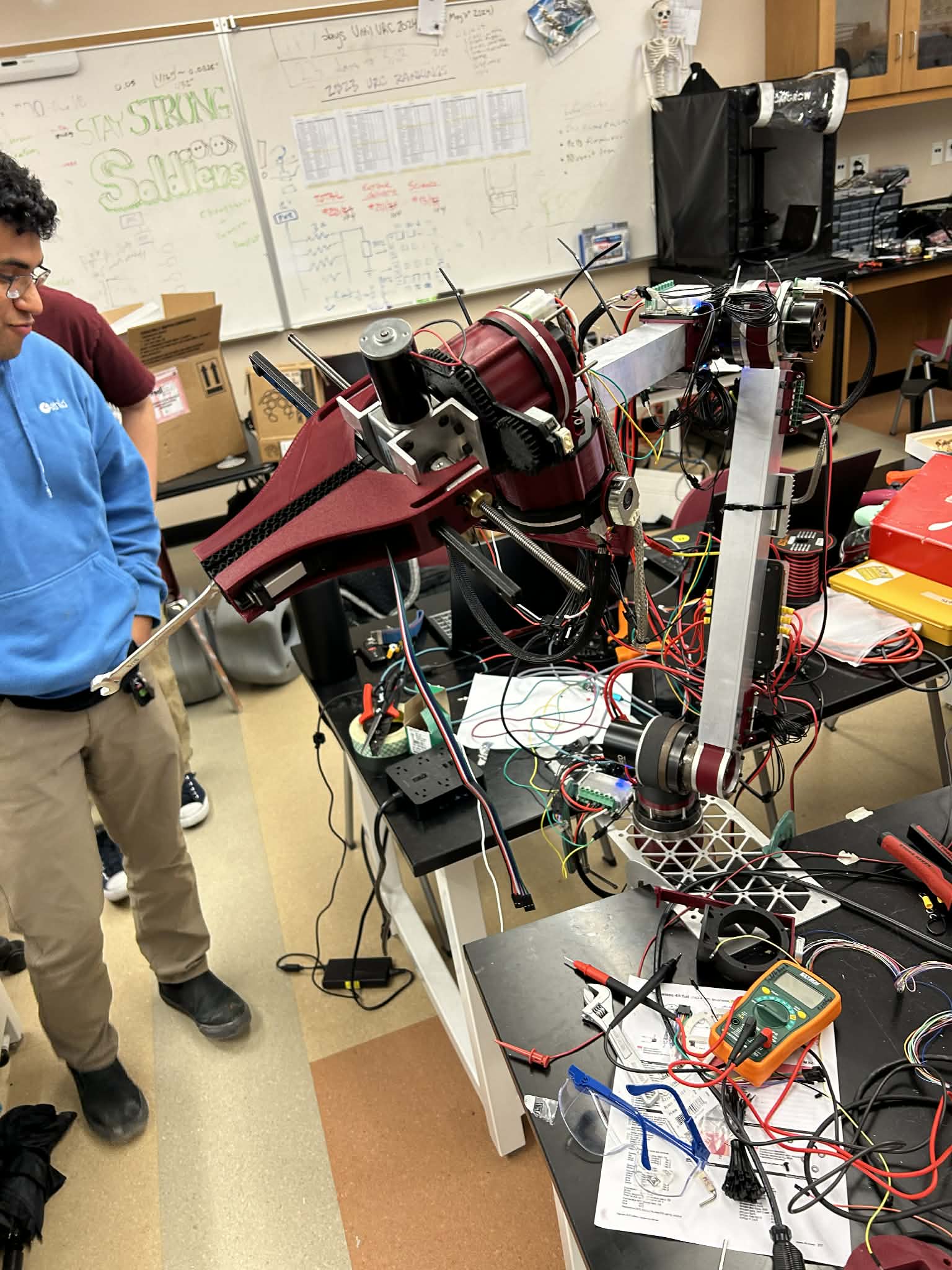
Leadscrew driven end effetor for SC Robotics, competing in the University Rover Challenge.
Video (1:06 for end effector)
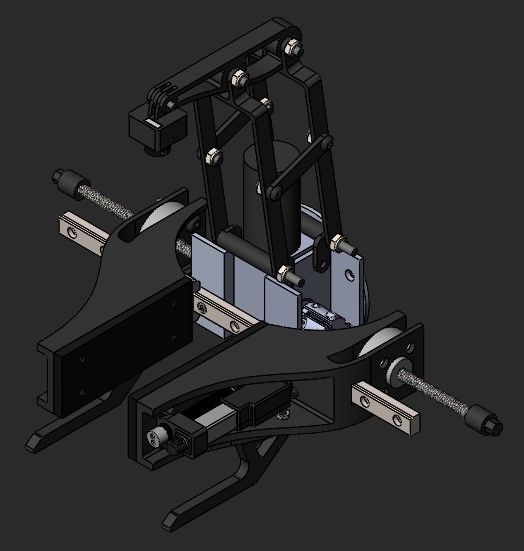
Novel lead screw end effector design
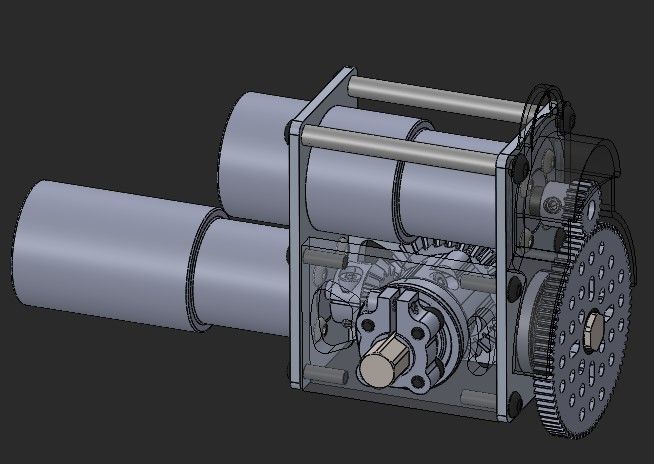
Two-axis wrist with bevel gear design
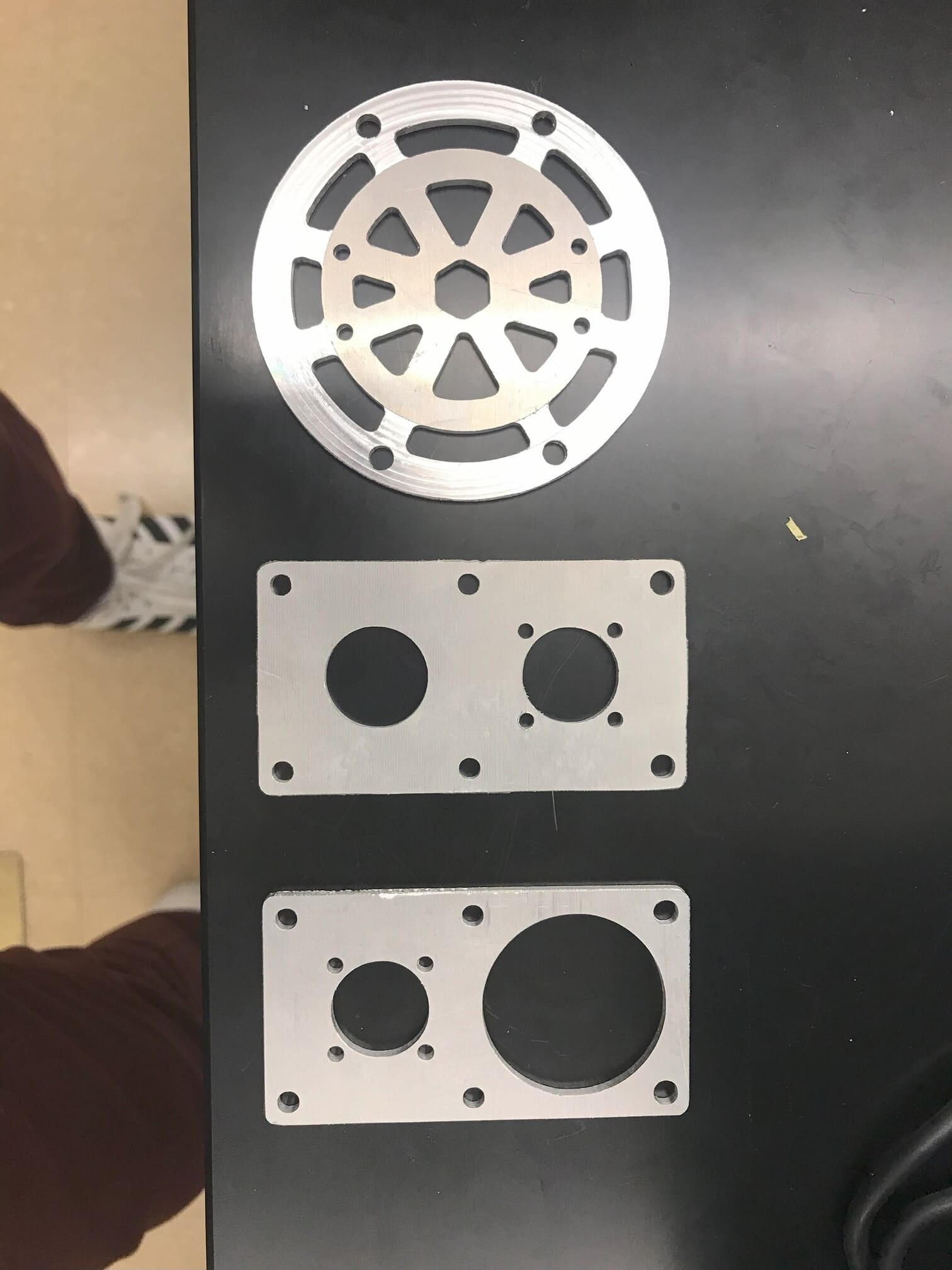
CNC plates
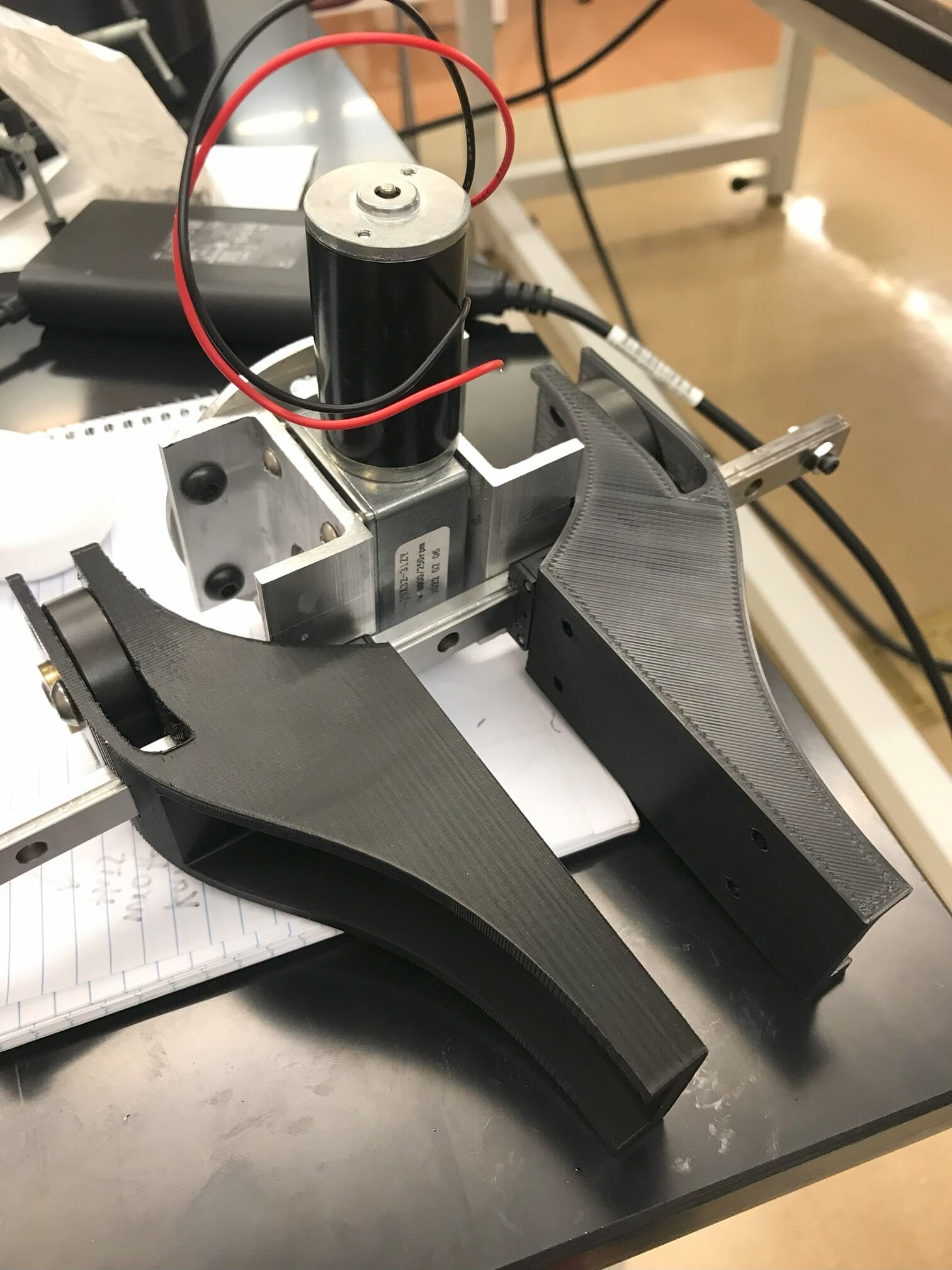
First assembly
Manual grip actuation
Manual wrist actuation

End effector on the two different arms I designed