
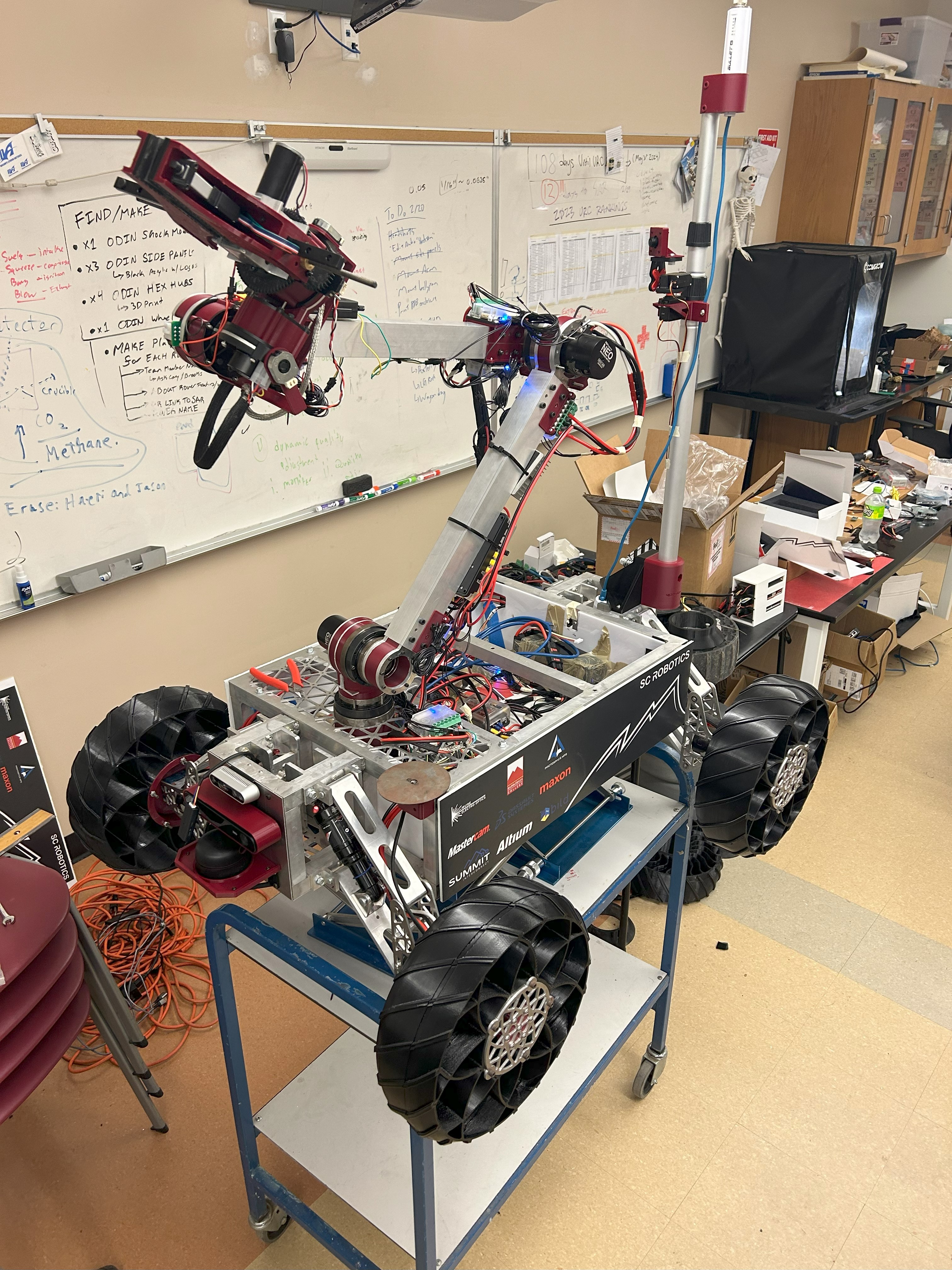
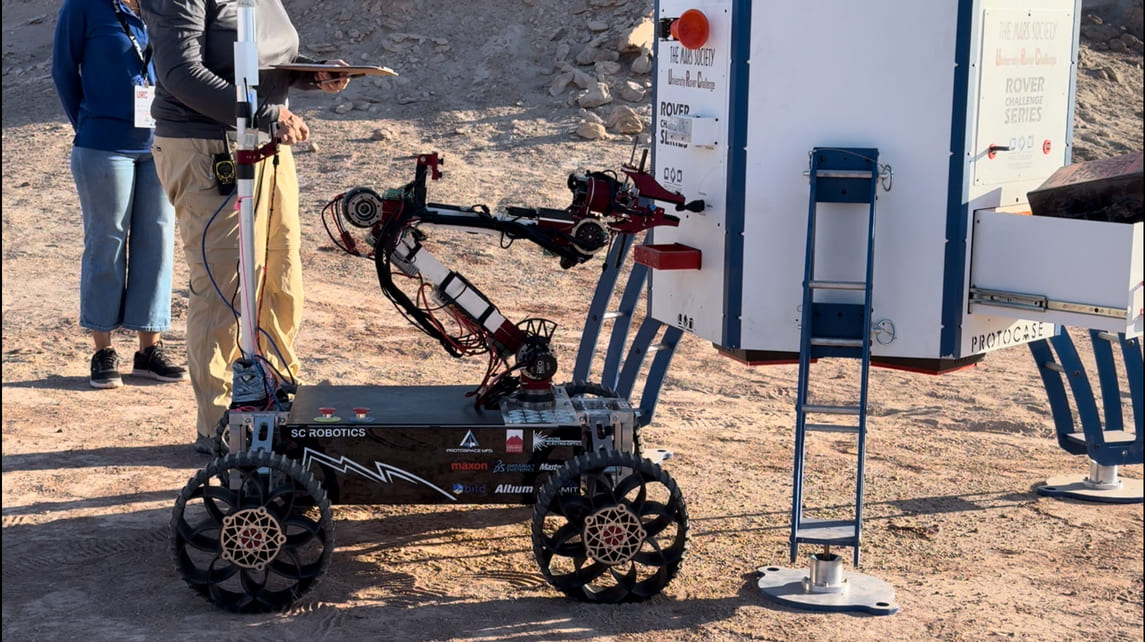
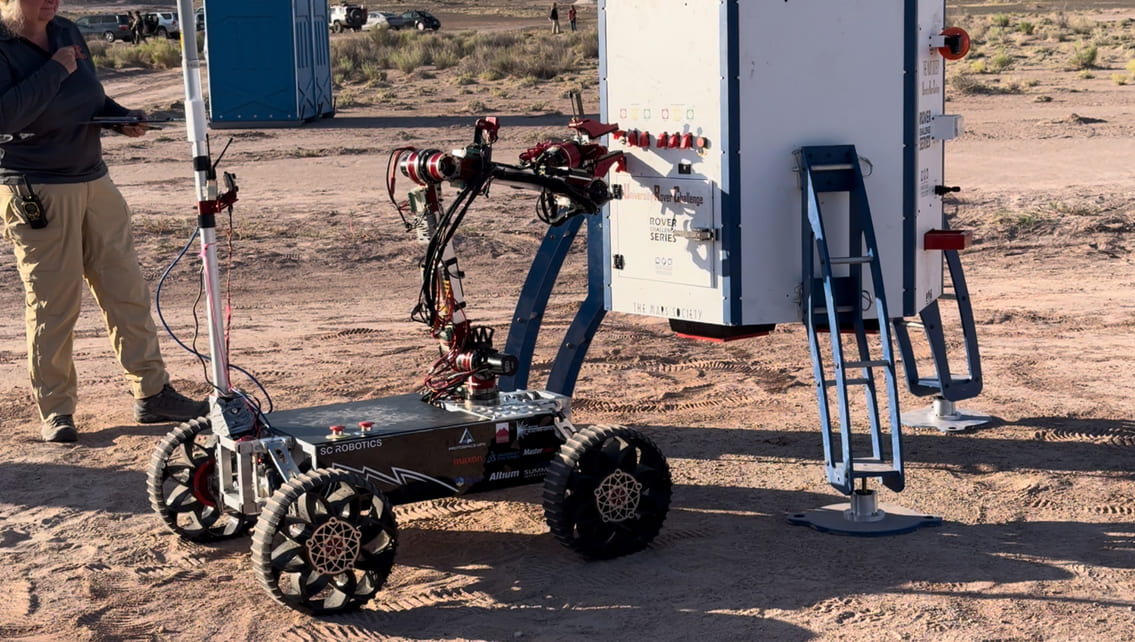
6 degree of freedom arm for SC Robotics, competing in the University Rover Challenge
Video (1:23 for the arm explanation and demonstration)
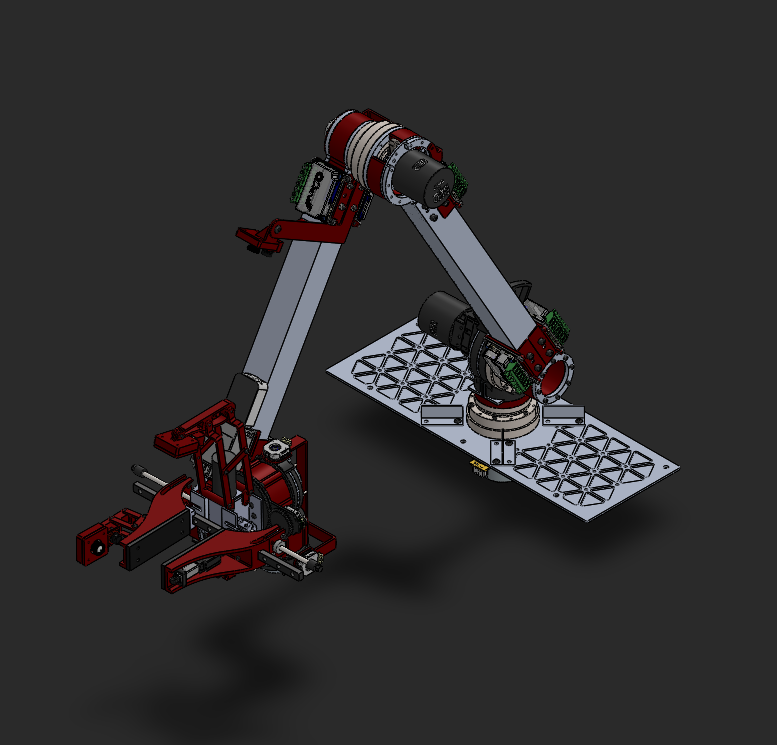
Overall design
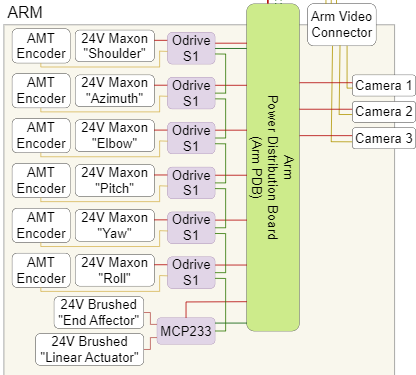
Electrical schematic
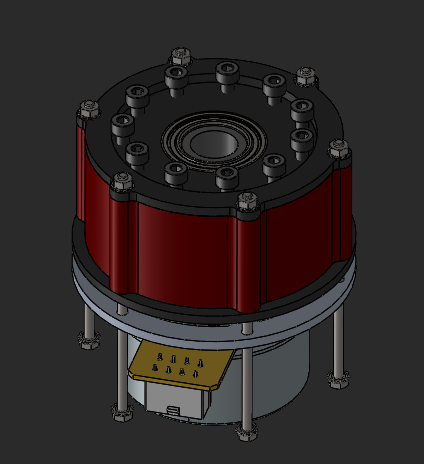
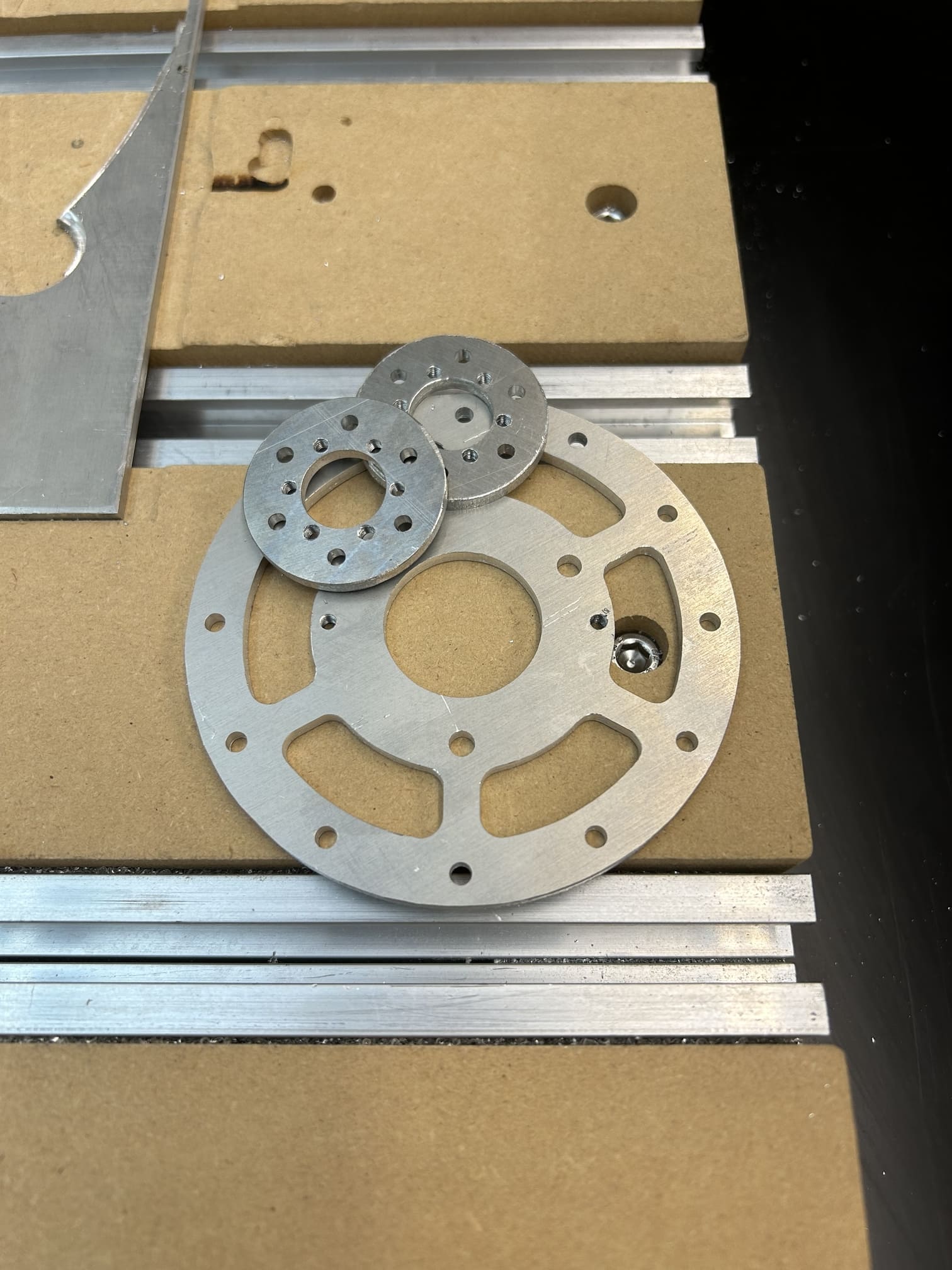
Custom cycloidal gearbox
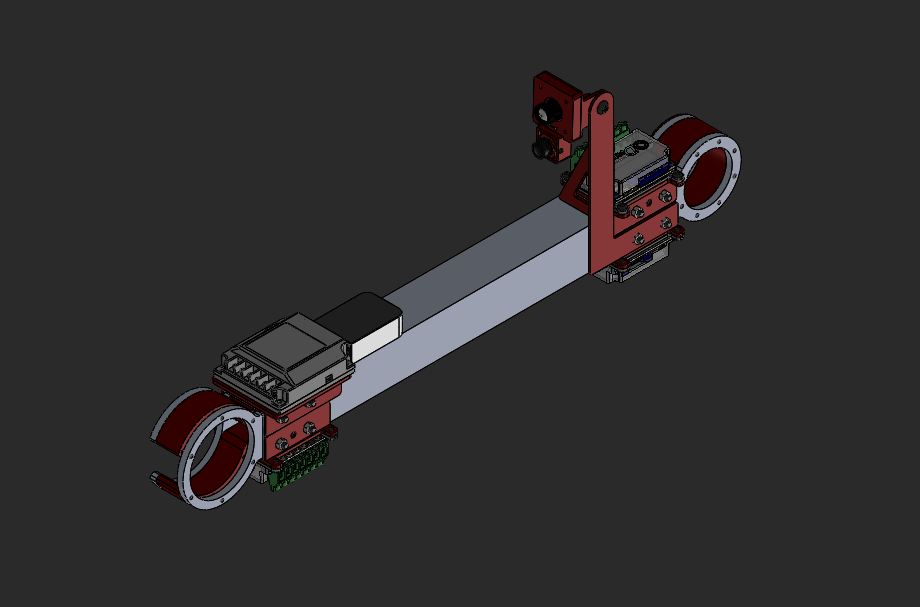
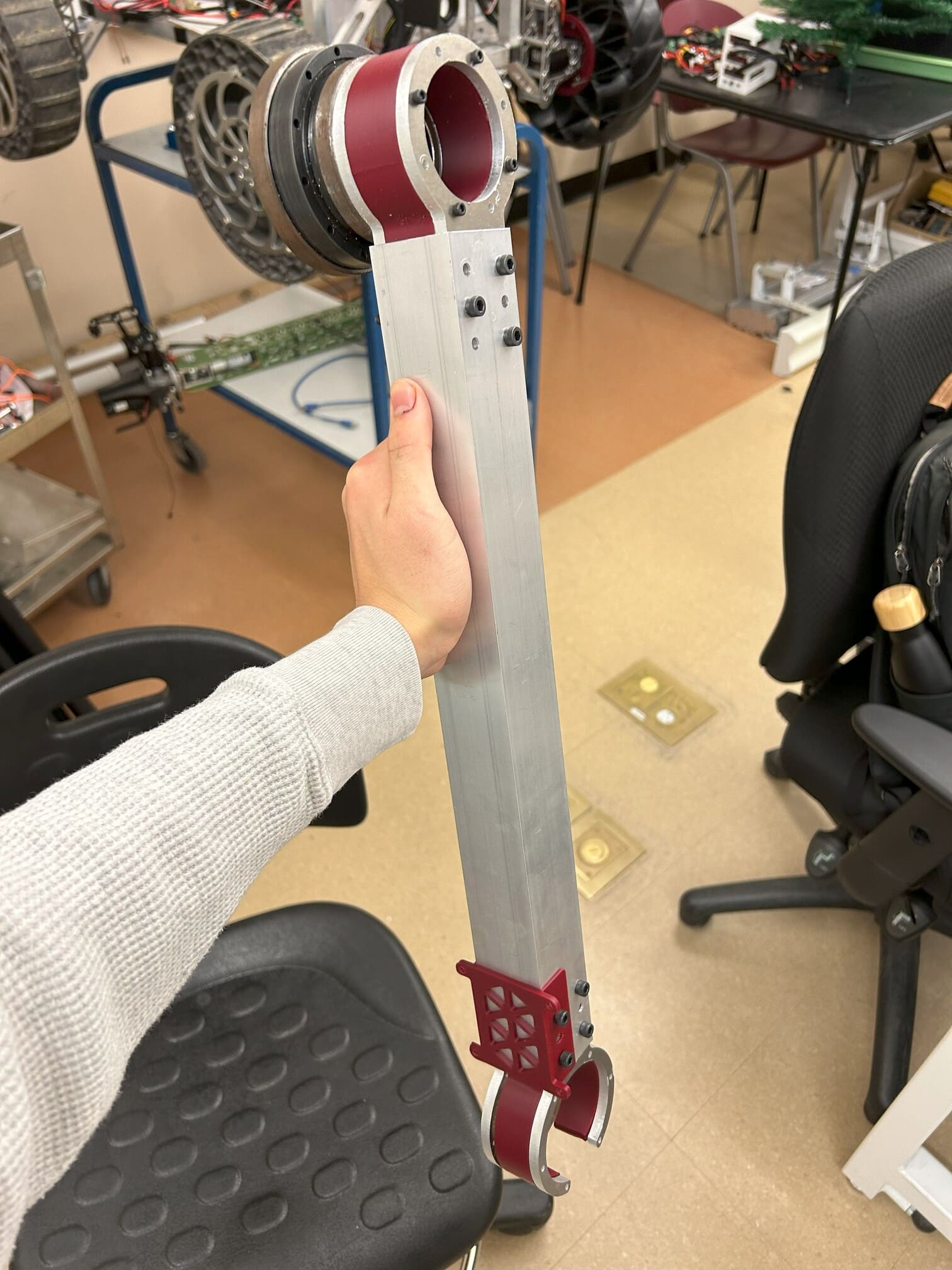
Forearm and bicep
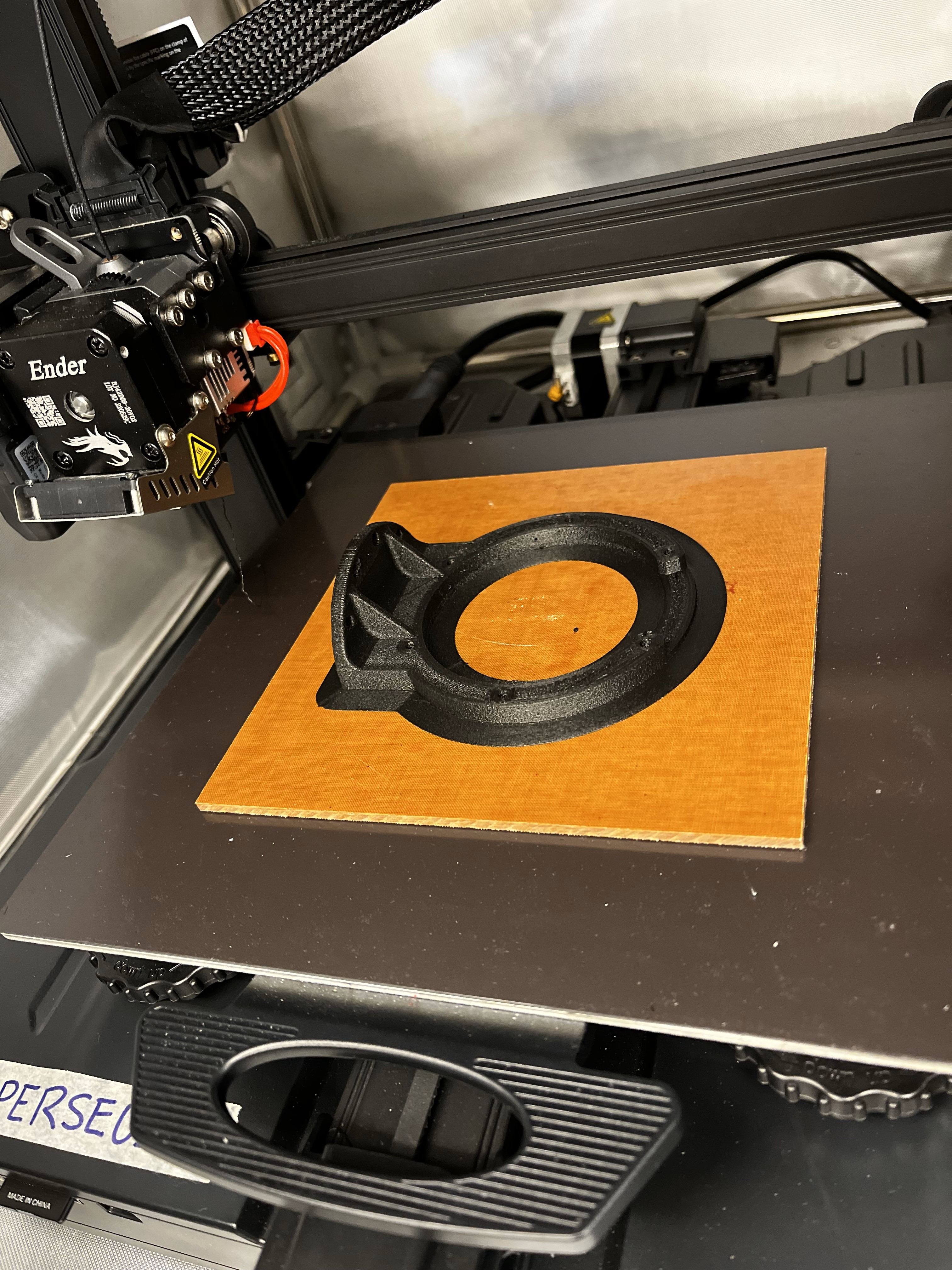
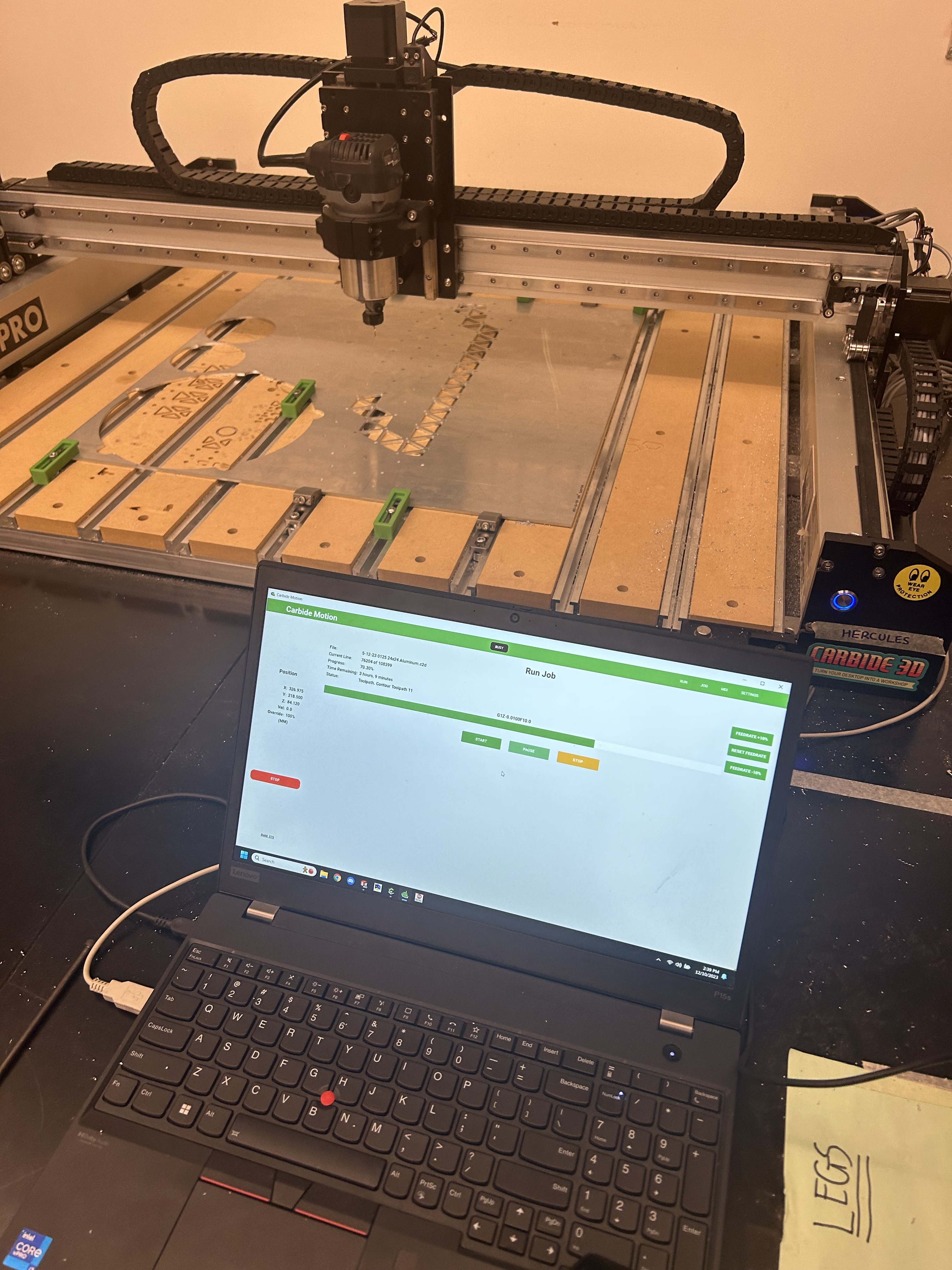


Manufacturing process
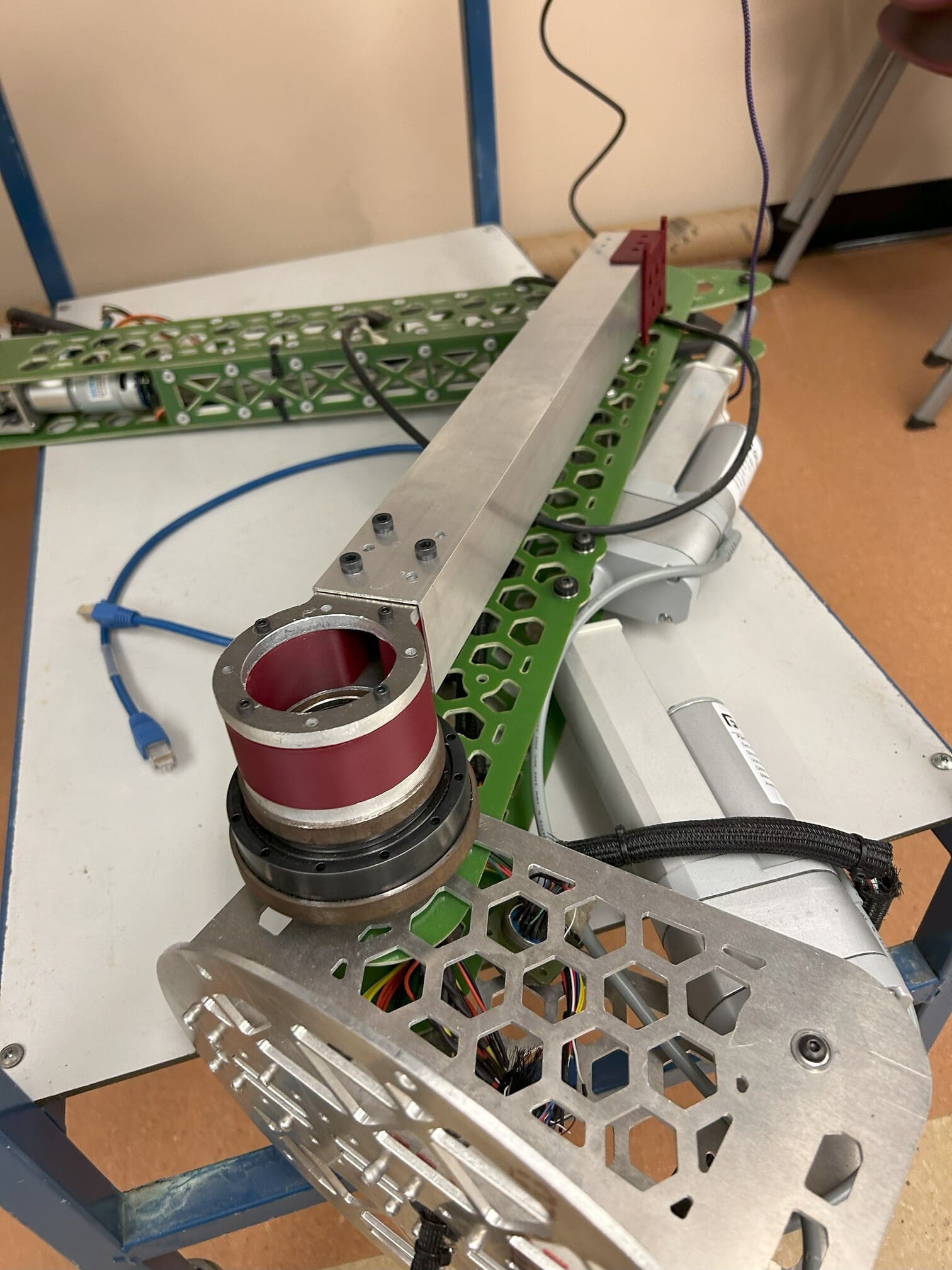

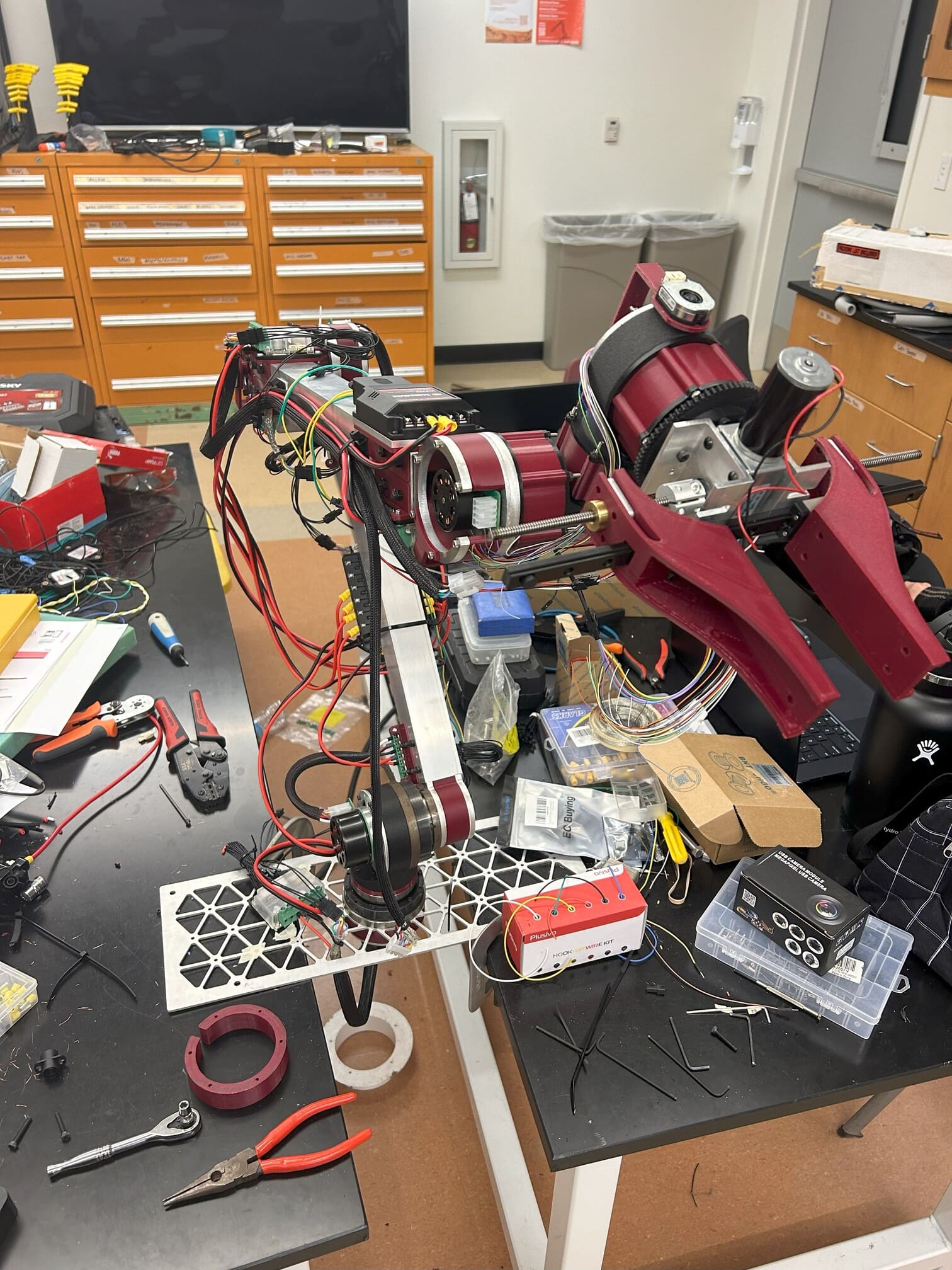
Assembly and build
Flipping a hat switch

Testing in the dark

The two arms I designed, side by side, menacingly



Delivery Mission (5th place)

Equipment Servicing Mission (11th place)
